The team of researchers designed the device to navigate the brain’s arteries and blood vessels to treat aneurysms and other neurological conditions. It was inspired by insect legs and flagella tail-like structures that allow microscopic organisms to swim, according to the researchers.
So far, the steerable catheter has been successfully tested in pigs at the Center for Future of Surgery at UC San Diego.
“As a neurosurgeon, one of the challenges that we have is directing catheters to the delicate, deep recesses of the brain,” Alexander Khalessi, chair of the Department of Neurological Surgery at UC San Diego Health, said in a news release. “Today’s results demonstrate proof of concept for a soft, easily steerable catheter that would significantly improve our ability to treat brain aneurysms and many other neurological conditions, and I look forward to advancing this innovation toward patient care.”
The current standard of care in aneurysm surgery involves neurosurgeons inserting curved-tip guidewires into an artery near the groin to guide catheters through the heart and into the brain. However, the guide wires have to be removed before the tip of the catheter can provide the necessary treatment.
“Once the guidewire is retrieved, the catheter will return to its native shape, often straight, resulting in loss of access to the pathology,” Jessica Wen, who coordinated work with the Center for the Future of Surgery at UC San Diego, said.
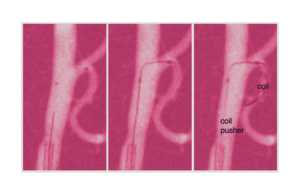
UC San Diego researchers suggest that the gold standard method makes it “extremely difficult” to place and keep the catheter in the right position to release platinum coils that block blood flow to an aneurysm and prevent a brain bleed.
Steerable catheters are currently unavailable for neurosurgery because the brain’s blood vessels are small. Devices need to be less than 1 mm in diameter and 5 ft long.
“Unfortunately, many of the most important blood vessels we need to treat are among the most tortuous and fragile in the body,” the study’s corresponding author James Friend said. “Although robotics is rising to the need in addressing many medical problems, deformable devices at the scales required for these kinds of surgeries simply do not exist.”
Researchers used inspiration from nature and soft robotics to find a solution to navigating the tortuous anatomy of the brain.
“We were inspired by flagella and insect legs, as well as beetles mating, where microscale hydraulics and large aspect deformation are involved,” Gopesh Tilvawala, the paper’s first author, said. “This led us to developing [a] hydraulically actuated soft robotic microcatheter.”
To develop the catheter, researchers had to develop a new way of casting silicone in three-dimension that could work at the size scales needed by depositing concentric layers of silicone rubber stacked on top of each other with varying stiffnesses. The resulting catheter is a silicone rubber catheter with four holes inside its walls, with each hole being one-half the diameter of a human hair.
The UC San Diego researchers used computer simulations to determine the configuration of the catheter and other features like how many holes it should have, where the holes should be placed and the amount of hydraulic pressure needed to actuate it.
The catheter is guided through a handheld controller that the surgeon compresses to pass saline fluid into the tip of the catheter to steer it. The catheter’s steerable tip is visible on X-rays.
“This technology is ideal for situations when I need to make a 180-degree turn from the catheter position in the parent artery, and maintaining position and reducing kick-out is critical,” said Dr. David Santiago-Dieppa, a neurosurgeon at UC San Diego Health. “This advance may ultimately allow us to treat aneurysms, other brain pathologies and even strokes that we haven’t been able to in the past.”
The researchers plan to complete a “significant number” of animal trials — and first in human trials of the steerable catheter.
The research was funded by the American Heart Association, the American-Australian Association Sir Keith Murdoch Scholarship, UC San Diego’s Galvanizing Engineering in Medicine program, the Chancellor’s Research Excellence Scholarship, and the National Institutes of Health. It was published in the Science Robotics journal.
